机器人被誉为“制造业皇冠顶端的明珠”,是智能制造的重要支撑工具。随着机器人与人工智能技术的发展,“人机共融”成为发展趋势:机器人与人类共享工作空间,自然交互、紧密协调,实现人机共融。机器人力控制通过对环境的力觉感知与控制,实现机器人的“刚柔并济”。例如在机器人手术中,对手术刀的力控制可以实现创伤的有效缝合,同时避免对病患造成二次伤害;医疗康复任务中,机器人替代医师为病患提供辅助运动,促进肌肉力量与耐力恢复。对力控制技术的研究能够有效提高机器人的任务执行能力,为人机共融提供重要支撑。
由于与环境直接交互,机器人的力控制性能直接受到外部环境的影响。随着环境复杂性的增加,机器人的力控制问题面临着巨大挑战:在力控制过程中还需考虑动态障碍物、自身物理约束对机器人的影响,加之力控制过程存在负载变化、交互模型参数不确定等问题,在多约束条件下研究具有自适应补偿能力的力控制算法是关键。
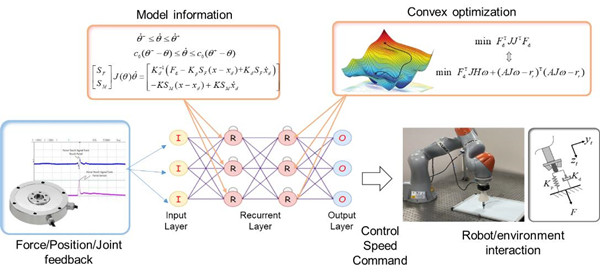
为此,省科学院智能制造研究所机器人技术团队提出了一种基于约束优化的理论框架,并将机器人模型信息引入神经网络,以模型与数据联合驱动的方式,提出了一种面向机器人力控制的轻量化神经网络架构。
针对环境中的动态不确定障碍物影响,采用深度相机实现对机器人周围环境的监控,采用背景差分技术去除环境中静态的物体从而实时捕捉环境中的由人引入的静态或者动态的障碍物,利用动态系统理论构建不等式约束,得到机器人动态避障的不等式约束;针对力控制任务,建立基于动态规划的外环控制模型,考虑系统的接触过程参数未知的问题,设计参数自适应学习的笛卡尔阻抗控制策略;以系统能量消耗为优化指标,结合系统的关节物理约束,得到具有约束-优化形式的力控制问题描述。针对系统高阶非线性耦合特点导致控制量求解困难的问题,设计了一种轻量化的递归神经网络:采用机器人模型信息辅助神经网络权值设计,通过挖掘机器人固有性质,从而简化神经网络结构,超参数收敛速度。在机器人关节角度与速度限幅的情况下,对刚度未知曲面的接触力控制误差不超过1%,同时节省能耗16%,该方法大大简化了神经网络结构,同时有效提升了机器人系统的适应性,在智能制造、防疫检测、医疗康复等领域有广泛的应用前景。
相关研究成果已发表在自动化与控制系统期刊《IEEE transactions on industrial electronics》(JCR一区;IF= 7.515)。
论文链接:https://ieeexplore.ieee.org/document/8984689
(省科学院智能制造研究所 徐智浩/供稿)
 附件下载:
附件下载: